

关于待检测天文望远镜
本案例测量检测的对象是泰国国家天文台(Thai National Observatory,TNO)的2.4米口径天文望远镜。该望远镜主镜直径2.4米,是东南亚地区性能最先进的光学望远镜之一。可将整体波前误差、指向精度、无导星跟踪精度等关键误差指标控制在极小的范围内。
超高的光学精度要求对望远镜各结构部件的制造精度提出了极为严苛的标准。主镜镜室、中间体、四通等关键结构件承载着主镜和次镜等光学元件,其形位公差直接影响主镜与次镜的相对位置稳定性和望远镜整体的光学指向精度与跟踪精度,中间体的同轴度和端面平行度直接决定俯仰轴承的回转精度,进而影响望远镜的指向与跟踪性能。因此,对这些大型结构件进行高精度的三维形位公差检测,是保障天文望远镜光学成像质量的必要前提。
需要检测的内容
针对本案例2.4米口径天文望远镜的结构部件,主要需检测以下关键形位公差项目:
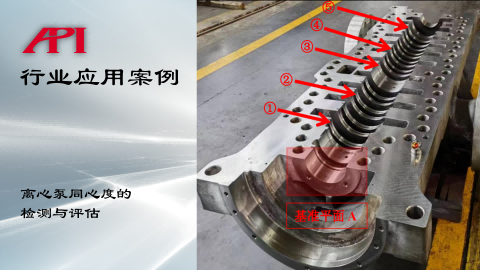
① 轴孔同轴度检测:望远镜中间体左右两侧轴孔的同轴度,直接关联俯仰轴系的回转精度。两侧轴孔的圆心位置偏差需控制在0.03 mm以内。
② 轴孔端面平行度(平面度)检测:中间体两侧轴孔端面的平行度误差直接影响轴承安装精度和轴系回转稳定性,检测精度要求优于0.03 mm级别。
③ 主镜安装面平面度检测:主镜安装面的平面度直接影响主镜的支撑精度和面形保持能力,要求达到微米级别的检测精度。
④ 各功能孔的位置度检测:望远镜结构中分布有大量用于安装、定位、连接的功能孔群,其位置度偏差直接影响各部件的装配精度和相互位置关系。
⑤ 部件整体三维尺寸偏差分析:将实测数据与理论三维数模进行比对,全面评估结构部件的制造偏差,确保各关键特征均满足设计公差要求。
测量难点
本项目的测量工作面临的技术难点:
其一,大尺寸与高精度并存。望远镜中间体等结构件尺寸较大,长度和跨度常常在2米以上,而检测精度要求却在数十微米级别。对于尺寸较小的中间体,可在三坐标测量仪上完成形位公差检测;但对于大尺寸中间体,其结构尺寸已超出大多数三坐标测量机的量程,难以实现有效测量。大尺寸与高精度的双重需求使得传统检测手段难以兼顾。
其二,形位公差检测涉及多坐标系空间关系。同轴度、平行度、平面度、位置度等多项检测内容需要建立在统一的空间坐标系下进行分析,且需要将实测数据与理论数模进行精确比对,这对测量仪器和软件的多维数据处理能力提出了较高要求。

图1:API品牌Radian Pro型号激光跟踪仪

图2:API系列激光跟踪仪(型号从左至右:iLT / Radian Plus / Radian Pro / Radian Core / iLTx)
API解决方案
API品牌的Radian Pro激光跟踪仪是面向高精度空间大尺寸坐标测量场景打造的专业三维精密测量设备。该设备搭载IFM干涉激光与ADM绝对激光双激光协同测量系统。IFM干涉激光作为长度计量的参考基准,保障测量数据的可溯源性和最高精度;ADM绝对激光支持快速的断光续接能力,兼顾测量稳定性与作业效率。
Radian Pro激光跟踪仪拥有微米级别的空间测量精度,测量范围超过160米,数据采集速率高达1000点/秒。此外,Radian Pro采用轻量化便携设计,激光头重量仅约9 kg,系统总重量(含包装箱及附件)约23 kg,便于现场搬运与多场景转场作业;且配备有温度、湿度、气压自动补偿系统,可快速适应现场环境。
图3:本案例测量现场(i)
测量实施过程
在本次泰国国家天文台2.4米口径天文望远镜结构部件检测项目中,API团队使用Radian Pro激光跟踪仪,配合靶球及隐藏点测量附件,制定了系统化的三维检测方案:
① 设备布设与系统建立。 测量工程师将Radian Pro激光跟踪仪布设于待测望远镜结构部件的周边合适位置,连接测量软件,完成设备开机,建立测量基准坐标系。
② 轴孔同轴度测量。 针对望远镜中间体两侧轴孔的同轴度检测,工程师手持内置棱镜的高精度SMR靶球,在轴孔内沿圆周方向均匀采集多点坐标数据;Radian Pro激光跟踪仪以1000 Hz的采数速率实时采集三维坐标,数据传输至测量软件。在软件中通过拟合算法确定两侧轴孔圆心坐标,进而计算出同轴度偏差值。

图4:本案例测量现场(ii)
③ 端面平行度测量。 对于轴孔端面平行度(平面度)的检测,工程师使用靶球在端面多个位置点采集空间坐标,采样点均匀覆盖整个端面范围。测量软件基于采集的点云数据构建平面模型,分析两端面之间的夹角偏差和平行度误差。
④ 功能孔位置度与三维尺寸偏差分析。 对各安装孔进行逐一采点测量,确定各孔的实际空间位置。将全部实测数据导入测量软件,与望远镜结构部件的理论三维数模进行自动比对,实现孔位置度、面轮廓度等多项形位公差的综合评估。可自动生成测量报告,直观展示各检测项目的偏差值及合格性判定。
⑤ 实时调装指导。 基于Radian系列激光跟踪仪强大的动态测量性能,如有部件需要现场调整,可使用“调装”功能进行实时指导。操作者将靶球吸附固定在工件上,通过实时跟踪测量,该固定点的三维坐标即时显示在屏幕中,系统可实时提示偏差方向和偏差量,指导操作者调整工件至设计的理论位置。

图5:本案例测量现场(iii)
更多拓展
除本案例介绍的望远镜结构部件形位公差检测外,API激光跟踪仪在天文望远镜制造及使用领域还有以下广泛的应用:
① 大口径标准镜制造检测:在大口径标准镜的制造过程中,Radian Pro激光跟踪仪可替代高精度三坐标测量机,对光学玻璃元件的平面度、面形精度等进行在线检测。通过90度倾斜安装方式,利用动态连续扫描测量模式进行采点(点间距1~2 mm),与高精度三坐标的测量PV值比对显示差值仅为4.7 μm,实现了与高精度三坐标同等级的测量表现。(请参考案例文章《API激光跟踪仪在天文仪器标准器大口径标准镜制造领域实现高精度测量》)

图6:Radian Pro激光跟踪仪90°倾斜安装测量光学玻璃元件
② 非球面镜在线检测:在非球面镜的干涉检验中,激光跟踪仪承担光学参数(离轴量、顶点曲率半径、光轴偏差误差)的检测任务,适用于大口径非球面研磨阶段的一般检测。利用激光跟踪仪在线检测可使磨削效率显著提高。
③ 拼接主镜装调对准:对于采用拼接镜面技术的大型望远镜,Radian激光跟踪仪可用于拼接主镜的初始装调,测量子镜的面外自由度和面内自由度位置姿态,实现多子镜拼接的精确对准与共相调整。
④ 望远镜桁架对准:针对大口径望远镜主副镜的对准需求,可基于激光干涉测距构建激光桁架主动对准系统,利用激光跟踪仪的高精度测距能力保障主副镜空间位姿的精确测量和控制。
⑤ 国家级天文重大工程整体测量:API公司在中国已积极参与了FAST大型望远镜(“中国天眼”)、月球车地面试验、载人航天对接实验等一系列国家重大科技项目的测量工作,为各类先进天文工程提供全面的高精度三维测量解决方案。(请参考案例文章《API激光跟踪仪在中国国家天文台500米口径球面射电望远镜工程中的应用》)

图7:API激光跟踪仪功能拓展附件

图8:API跟踪仪附件功能简介
小结
本次泰国国家天文台2.4米口径天文望远镜的结构部件检测项目,充分展现了API Radian Pro激光跟踪仪在大尺寸精密测量领域的独特优势。面对望远镜中间体等大型结构件“尺寸大、精度高、公差严”的三维检测需求,传统三坐标测量机量程不足,打表法等传统测量方法则精度有限、操作繁琐。Radian Pro激光跟踪仪凭借微米级的测量精度、超过160米的超大测量范围、IFM干涉激光提供的计量溯源性以及1000 Hz的高速数据采集能力,辅以丰富的功能拓展附件和专业的测量分析软件,实现了对轴孔同轴度、端面平行度、孔位置度等多项关键形位公差的全方位精密三维测量与评估。
该解决方案不仅精准完成了本次望远镜结构件的形位公差检测任务,其技术路线还可广泛应用于天文望远镜主镜制造检测、拼接镜面装调对齐、镜筒桁架结构空间定位、大型射电望远镜天线面形测量等多个关键场景,为大型天文望远镜的制造、装配及运行监测提供了可靠的三维测量数据保障,是驱动天文光学仪器制造迈向更高精度的卓越工业测量方案。
相关新闻:
离心泵同心度的检测与评估
离心泵同心度检测需求 离心泵的同心度指的是泵的轴心与泵的外壳或泵芯的轴心保持一致,既两装配圆柱面的轴线是否重合。同心度是离心泵生产中的一个重要的质量指标,良好的
API激光跟踪仪应用之 天文望远镜部件高精度三维检测
关于待检测天文望远镜 本案例测量检测的对象是泰国国家天文台(Thai National Observatory,TNO)的2.4米口径天文望远镜。该望远镜主镜直

轨道机车减震器底座的检修测量
轨道机车减震器座的检修 轨道机车减震器是机车车辆转向架装置上的重要减振构件,是保障机车高速运行平稳性、舒适性、安全性的关键部件。减震器座是连接减震器与转向架构架
特种车辆部件的精密三维测量
特种车辆制造 特种车辆,是指经特制或专门改装,配备有特殊的结构、装置、设备,用于特有用途的工作车辆。日常生活中常见的自卸载重车、固井水泥车、压裂车、公路清障车、
了解更多:

激光跟踪仪靶球&测头
Maximize laser tracker productivity with hand held and 激光跟踪仪主动靶标.

XD Laser CMM Calibration
The XD Laser is the only assessment system that can measure all 6 error parameters simultaneously in a single set-up
了解更多 /xd-laser
API Reverse Engineering Service
Reverse engineering services include scan as-built parts to creation of a 3D digital point cloud and CAD Model.