

人形机器人领域发展简介
人形机器人,如今正以前所未有的速度从科幻想象走向产业现实。近年来,全球人形机器人产业正在经历从概念验证到量产的重要时期。人形机器人使用需求以及制造增长势头进一步加速。业界预计,未来人形机器人年销量有望突破亿台大关,形成一个市场规模超过十万亿元的大产业。
在这一产业爆发的背景下,人形机器人的检测、校准与标定技术成为保障产品质量、提升运动精度的关键支撑。与传统的工业机器人相比,人形机器人关节数量多(通常在20个以上)、运动链更长、自由度更高,其运动学标定和精度检测面临更加复杂的技术挑战。
人形机器人检测重要参数指标
人形机器人的检测与标定涉及多类参数,其中核心指标包括:
(1)绝对定位精度:机器人末端执行器或各关节在空间坐标系中实际到达位置与理论目标位置之间的偏差。这是评价人形机器人执行精细任务能力的核心指标,在精密装配场景中通常要求≤±0.05mm;
(2)位姿重复性:机器人末端重复到达同一目标位置和姿态时的一致性程度,反映系统随机误差水平;
(3)D-H运动学参数:包括连杆长度、连杆扭角、关节偏距、关节转角等24项参数。这些参数是机器人运动学模型的数学基础;
(4)轨迹准确度和重复性 :机器人沿预设路径运动时,实际轨迹与理论轨迹之间的偏差及多次运行的重复性。对于人形机器人,这直接影响其行走、抓取等复杂动作的执行质量;
(5)拐角偏差:机器人通过轨迹拐角处时实际路径与理想路径之间的最大偏差值;
(6)六自由度(6DoF)空间位姿:测量各关节在运动过程中的空间六维姿态变化;
(7)双足步行稳定性参数:包括重心地面投影点(CoG)、零力矩点(ZMP)和压力中心(CoP),这些是评价人形机器人双足步行机构行走稳定性的重要参数。
传统测量手段的不足
对于人形机器人的相关检测内容,如使用传统的测量手段,或多或少会存在相应方面的不足:
(1)动态测量能力不足:传统三坐标、关节臂等虽然测量精度可以满足,但仅适用于静态条件,无法捕捉人形机器人在运动过程中的实时位姿变化;
(2)动态测量精度不足:传统采用安装在脚部的六维力矩传感器检测地面反力信息来间接计算CoP和ZMP的方法,由于未考虑机器人自身重量及负载状态下双足结构发生的变形,易导致所测数据失真,进而影响整体试验效果;
(3)额外误差过大:使用传统的测量手段采集数据时,往往需要多次触碰机器人本体,易造成机器人位置变化,使测量数据欠精准;
(4)工作空间受限:传统三坐标及关节臂受限于固定的测量台面和有限的测量行程,难以覆盖人形机器人大范围运动空间内的全部测量要求;
(5)效率相对较低:传统方法通常需要大量人工干预和多次重复操作,标定一台多关节人形机器人耗时较长,难以满足量产阶段的高效检测需求。

图1:API品牌系列激光跟踪仪展示(型号自左至右:iLT / Radian Plus / Radian Pro / Radian Core / iLTx)
API激光跟踪仪应用优势
API品牌的Radian及iLT系列激光跟踪仪以其卓越的技术性能和智能化的测量方式,在人形机器人检测标定领域展现出显著优势:微米级测量精度以及超过80米的测量半径,可轻松满足人形机器人的测量空间需求;1000Hz测量速率,满足高精度动态数据采集标准;可配合夹具或功能靶标实现自动化测量,减少人员干预,让测量数据更客观;操作便捷,人机友好,单人即可完成测量作业,测量事半功倍。

图2:API激光跟踪仪人形机器人测量现场(I)
测量过程
(1)测量准备与设备布设
将API激光跟踪仪布设于待测人形机器人周边合适位置,射出的激光与机器人各待测节点保持通视,连接笔记本电脑,即可开始测量。
(2)数据采集
常规测量时,操作者手持内置棱镜的靶球,激光跟踪仪射出激光至靶球中心并锁定跟踪,操作者随即使用靶球触碰待测位置,跟踪仪即可测量到该位置空间点的坐标,并将数据反馈至测量软件用于分析;
在针对人形机器人一些有自动化测量需求的场景时,可使用API研制的专用工装,放置单个或者多个靶球,再移动机器人末端(手、足等)至待测位置,随即可操作跟踪仪依次测量单靶球或多靶球,对待测位置实现三维或六维的测量,实现对位置和姿态的评价分析;

图3:API激光跟踪仪人形机器人测量现场(II)
除靶球外,亦可使用带有反向锁定功能的ActiveTarget活动靶标,或者具有6自由度(6DoF)测量功能的STS六维传感器,实现对人形机器人关键指标的静态及动态高精度测量。

图4:机器人测量靶标解决方案及功能简介
(3)数据分析与处理
通过测量软件对采集到的若干空间点进行数据处理,构建相应的线、面、体等几何元素,精准分析各标的之间的平行度、平面度、垂直度、直线度、角度分度等位置关系,由此计算出各关节相对于机器人各姿态下的六维参数,包括CoG、ZMP等双足步行稳定性参数,并将测量结果实时反馈。
将不同状态下的测量数据进行比较,分析机器人自由状态及负载状态时各部机械支撑结构的变形情况,以及各关节的运动学偏差。在RPM-DH软件中,将实际测量数据与机器人理论运动学模型进行对比,辨识出实际的D-H参数,生成补偿参数数据表,对机器人控制系统的运动学模型进行修正。整个测量过程可实现高度自动化测量,分析并反馈结果。
完成参数补偿后,再次运行测量程序,验证标定效果,确保机器人的绝对定位精度、轨迹精度等指标满足使用要求。系统可根据ISO 9283标准自动生成检测报告。

图5:RPM-DH机器人测量软件
API RPM-DH机器人校准软件
RPM-DH(Robot Performance Measurement & Denavit-Hartenberg Modeling & Calibration)软件是API公司专为机器人性能评估和运动学校准而开发的集成化软件平台,配合Radian及iLT系列激光跟踪仪,可对工业机器人、协作机器人、人形机器人等在运动空间内的性能指标进行全面评估,并实施精准补偿。
该软件包含两大核心模块:
RPM模块(Robot Performance Measurement) :用于机器人性能指标的测量与收集,围绕ISO 9283标准设计,可对机器人位姿准确度和重复性、多方向位姿准确度变动、距离准确度和重复性、位置稳定时间和超调量、位姿漂移特征、互换性、轨迹准确度和重复性、重定向轨迹准确度、拐角偏差、轨迹速度特征、最小定位时间、静态柔顺性、摆动偏差等14项关键性能指标进行自动化检测与评估。软件提供友好的人机交互界面,测量数据和分析结果支持图形化显示,并可以HTML、Excel、PDF等多种格式输出检测报告。
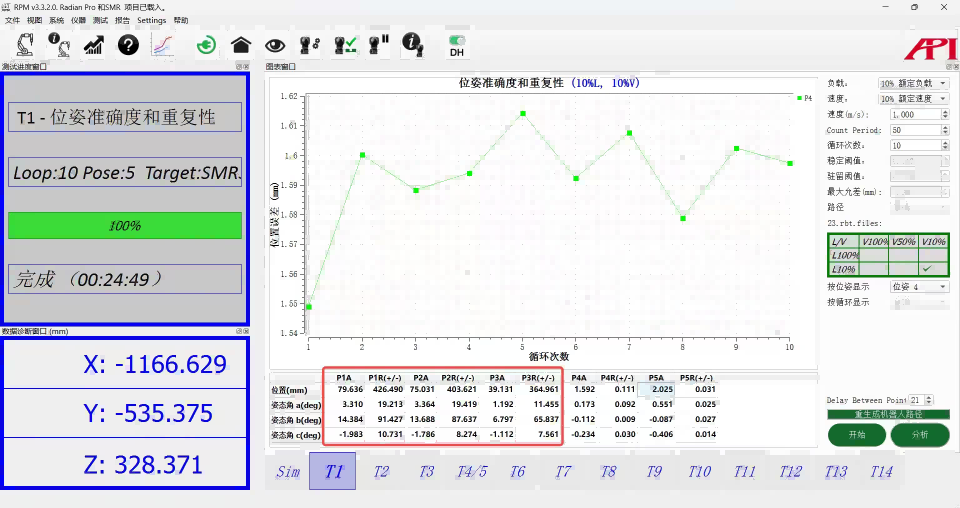
图6:机器人性能测试
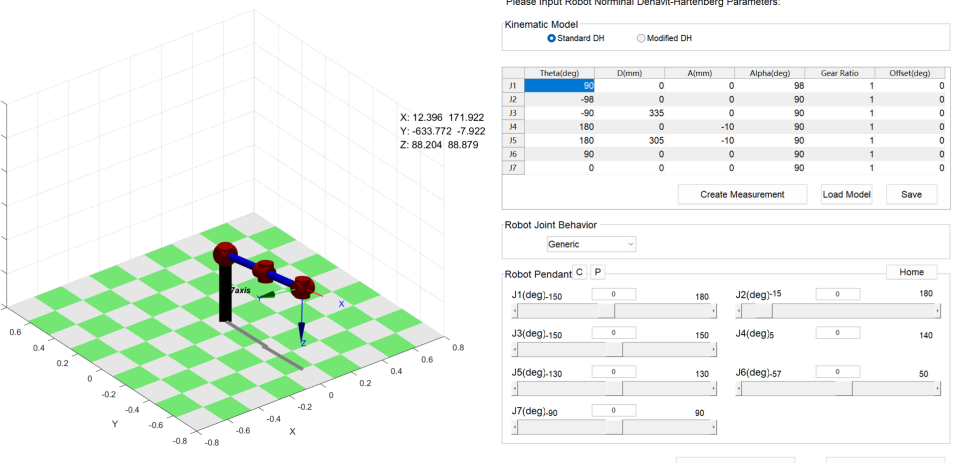
图7:机器人D-H标定
DH模块(Denavit-Hartenberg Modeling & Calibration) :用于机器人运动学参数的校准指导。该模块通过激光跟踪仪采集机器人多姿态下的末端位置数据,采用先进算法对机器人的D-H参数进行辨识,自动求解实际运动学参数。校准完成后,软件生成补偿参数数据表,用户可将修正后的参数导入机器人控制器,从而显著提高机器人的绝对定位精度和运动轨迹精度。
在实际应用中,RPM-DH软件与API激光跟踪仪无缝集成,从数据采集、参数辨识到精度补偿实现全流程自动化,可为人形机器人从研发调试到量产检测的全生命周期提供可靠的测量技术支撑。
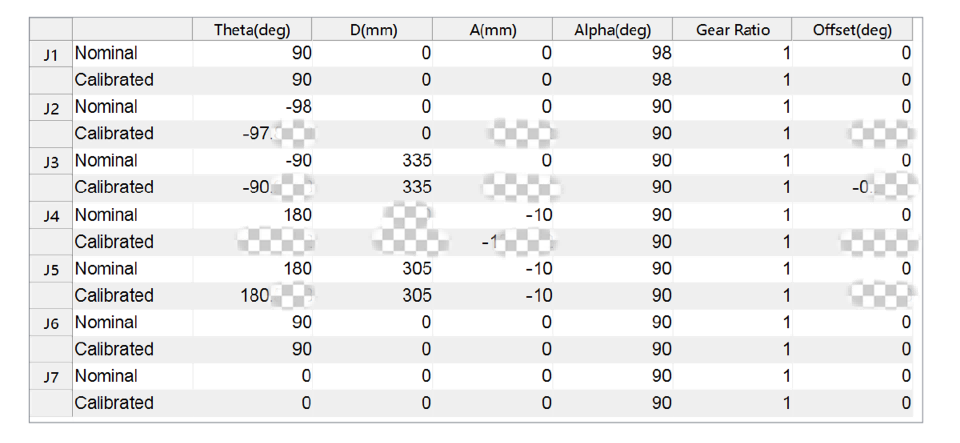
图8:初始和校准后D-H参数比对
小结
随着人形机器人产业飞速发展,产品性能与质量的保障需求愈发迫切。API品牌的Radian及iLT系列激光跟踪仪凭借微米级测量精度、六自由度和动态测量能力、智能化自动测量功能以及紧凑便携的设计,为人形机器人的检测、校准与标定提供了高效、精准、可靠的解决方案。

图9:API公司总部大楼
关于API
API品牌由Kam Lau博士在1987年创立于美国马里兰州的罗克韦尔,是激光跟踪仪的发明者,同时持有多项全球领先测量科技的专利,是精密测量科技领域的引领者;API自成立以来,始终致力于机械制造领域精密测量仪器和高性能传感器的研发和生产,产品已广泛应用于世界各国的先进制造领域,并在坐标测量和机床性能测试的高精度标准方面处于领先地位。
相关新闻:

轨道机车减震器底座的检修测量
轨道机车减震器座的检修 轨道机车减震器是机车车辆转向架装置上的重要减振构件,是保障机车高速运行平稳性、舒适性、安全性的关键部件。减震器座是连接减震器与转向架构架
特种车辆部件的精密三维测量
特种车辆制造 特种车辆,是指经特制或专门改装,配备有特殊的结构、装置、设备,用于特有用途的工作车辆。日常生活中常见的自卸载重车、固井水泥车、压裂车、公路清障车、
API激光跟踪仪在人形机器人检测标定领域的应用
人形机器人领域发展简介 人形机器人,如今正以前所未有的速度从科幻想象走向产业现实。近年来,全球人形机器人产业正在经历从概念验证到量产的重要时期。人形机器人使用需
API测量服务纪实 - 萃取塔中心轴线三维测量
萃取塔 萃取塔:在石油炼制、化工、制药等流程工业的庞大装置区中,矗立着一类圆柱形设备,即萃取塔。作为实现混合物分离、提纯与化学反应的核心装备,萃取塔通过内部精密
了解更多:

激光跟踪仪靶球&测头
Maximize laser tracker productivity with hand held and 激光跟踪仪主动靶标.

XD Laser CMM Calibration
The XD Laser is the only assessment system that can measure all 6 error parameters simultaneously in a single set-up
了解更多 /xd-laser
API Reverse Engineering Service
Reverse engineering services include scan as-built parts to creation of a 3D digital point cloud and CAD Model.