

概述
大型舱段,往往具有尺寸和重量巨大的特征。但同时,大型舱段的总装精度又通常有着很高的要求,其对接精度会影响到整个舱段最终的质量。实践中,有设计通过提升加工精度的方式提高最终装配准确性的方案,但实行起来非常苛刻、艰难;而更加有效的方法,则是通过改善和优化装配方法,对整个装配过程的顺利实施起到支撑作用。
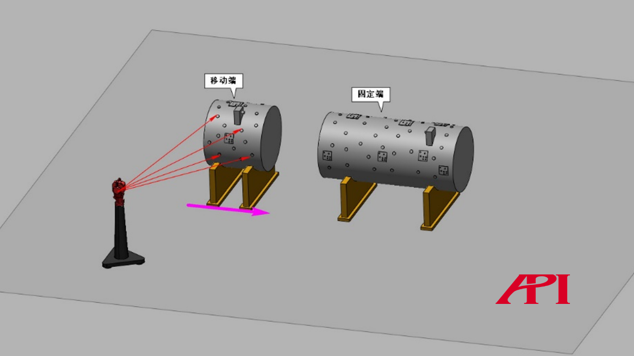
图1:对接过程监控示意图
API高精度测量对接方案
结合大型舱段自身的特点和装配需求,基于API品牌Radian激光跟踪仪的自动对接技术的应用,可有效提升装配精准度和工作效率。
API解决方案,如图1所示,将Radian激光跟踪仪布设在移动端舱段旁,监控在大部段圆筒实际装配过程中,圆筒表面上的标志点的位置和姿态,将移动端筒段的位置和姿态与虚拟装配后的结果比对,根据转化矩阵可以得出旋转、平移等参数,反馈给控制机构,这样便可实现实际装配结果与虚拟装配结果一致。
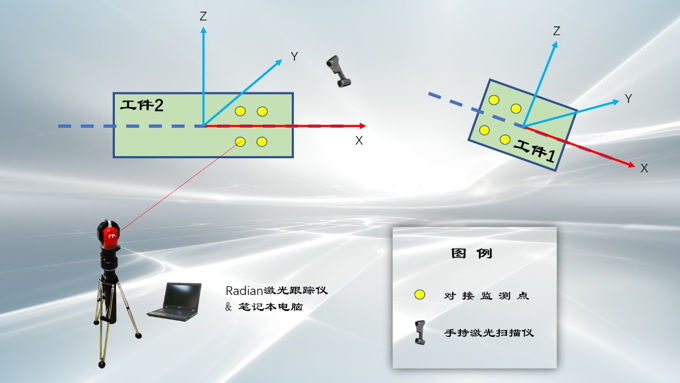
图2:对接示意图
具体实施与操作
使用Radian激光跟踪仪对法兰安装面及销孔进行精确测量,获取被测端面真实的三维状态;同时对大部段装配过程采用激光跟踪仪进行监测;在连接法兰的一侧布设若干监测控制点,这些控制点可以同时被激光跟踪仪测量,通过转换得到两个舱段对接法兰面的相对位置和姿态关系,并将移动端的实时位置及姿态上传到上位机中,而上位机获取移动端的位置及姿态后,此时就可以将其所要调整的数据反馈到控制调节机构,从而实现闭环自动对接功能。
通过上述的高精度测量,得到了固定端和移动端的相关尺寸。闭环控制的对接过程,是在前期基准坐标系的基础上,通过对目标坐标系的对比分析,得到当前位姿的偏差矩阵,给出的每次偏差,即为当前位姿与目标位姿的调整量。具体可分四步操作实现:
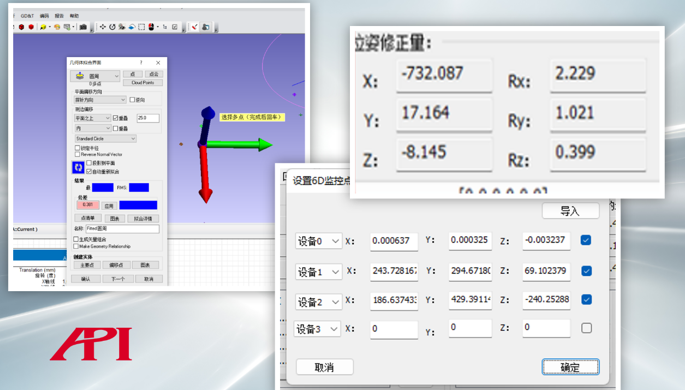
图3:建立坐标系(左)、设置监控点(右下)、位姿修正量(右上)在软件中的示意
1、测量并建立反馈机构坐标系
2、创建出目标坐标系。首先创建移动端坐标系,再以反馈机构坐标系为工作坐标系使用移动命令,源坐标系选为移动端坐标系,对象坐标系选为固定端坐标系,要转化的坐标系选取反馈机构坐标系。通过坐标系移动变化,得到目标坐标系。
3、使用6D导航软件,实时监控3个观察点。
4、通过上位机查询并发出指令,跟踪仪自动测量3个标识点的靶球,得到当前位姿的调整量,完成闭环控制。通过3-4次调整,顺利完成对接操作。
结论
Radian激光跟踪仪自动对接技术的应用,可有效提升大型舱段装配精准度及工作效率。
相关新闻:
中大型机加工零件的三维检测
项目背景 客户公司:某国家大型制造企业 ;所属行业:高端装备制造业,重型机械加工;应用场景:大型镗铣加工中心的精度检测。 该企业拥有用于加工大型设备部件的大型镗
激光切割机BC角精度检测和重复性测试 API激光跟踪仪应用纪实
关于激光切割机与检测的重要性 激光切割机作为现代制造业的核心装备之一,广泛应用于航空航天、汽车制造、钣金加工等领域。其通过高能量激光束对金属或非金属材料进行精确
API激光跟踪仪在大型制糖设备 三维测量检测领域的应用
大型制糖设备与三维测量检测的重要性 大型制糖设备是糖厂生产的核心,涵盖从原料预处理、糖分提取、糖汁清净、蒸发结晶到分离干燥的全流程装备,主要包括甘蔗压榨机、甜菜

API激光跟踪仪在AGV测量领域的应用
关于AGV AGV(Automated Guided Vehicle)即“自动导引运输车",是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径
了解更多:

激光跟踪仪靶球&测头
Maximize laser tracker productivity with hand held and 激光跟踪仪主动靶标.

XD Laser CMM Calibration
The XD Laser is the only assessment system that can measure all 6 error parameters simultaneously in a single set-up
了解更多 /xd-laser
API Reverse Engineering Service
Reverse engineering services include scan as-built parts to creation of a 3D digital point cloud and CAD Model.